
เครื่องบันทึก Panaromic 360 องศาจาก Aaremu Augmented Reality Emulator/Simulator
Aaremu (https://github.com/donaldmunro/aaremu) เป็นเครื่องมือซอฟต์แวร์ที่เปิดใช้งานการจำลองความเป็นจริงที่เพิ่มขึ้น
โดยอนุญาตให้นักพัฒนา AR บันทึกมุมมอง 360 องศาของก
ตำแหน่งโดยใช้กล้องอุปกรณ์และเซ็นเซอร์หมุน อาร์คาเมรา
คลาสที่ให้นักต้มตุ๋นหรือจำลองของคลาสกล้อง Android
จากนั้นสามารถใช้ตัวอย่างฉากที่บันทึกไว้แทนการถ่ายทอดสด
ตัวอย่างกล้องถ่ายภาพโดยคลาสกล้อง Android อาร์คาเมรา
ดูตัวอย่างการโทรกลับมีความคล้ายคลึงกับตัวอย่างกล้องมาตรฐาน
การโทรกลับยกเว้นว่าไบต์ตัวอย่างที่มีให้ในการโทรกลับ
ถูกแยกออกจากไฟล์ที่สร้างโดยแอปพลิเคชันตัวบันทึก
ขึ้นอยู่กับแบริ่งปัจจุบันที่ส่งคืนโดยการปฐมนิเทศ
เซ็นเซอร์ ไบต์ตัวอย่างเหล่านี้จะถูกส่งผ่านไปยังรหัสการพัฒนา
ผ่านการโทรกลับตัวอย่างเดียวกันตามที่ได้รับจากกล้องมาตรฐาน
ชั้นเรียนและสามารถประมวลผลได้ด้วยอัลกอริทึมการมองเห็นคอมพิวเตอร์
ก่อนที่จะแสดงโดยแอปพลิเคชันไคลเอนต์ เฟรมคือ
จัดเก็บเป็นเฟรมวิดีโอแต่ละอันในรูปแบบ RGBA, RGB หรือ RGB565
และไม่ใช่วิดีโอเพื่อให้สามารถเข้าถึงตัวอย่างได้ทั้งสองอย่าง
ทิศทางตามเข็มนาฬิกาและทวนเข็มนาฬิกาและการพยายามที่จะแบริ่งอย่างแม่นยำ
สถานที่สามารถเป็นไปได้แทนที่จะไปที่คีย์เฟรมวิดีโอ
เครื่องมือนี้มีวัตถุประสงค์เพื่อพัฒนาแอปพลิเคชัน AR กลางแจ้งมือถือ AR
เนื่องจากช่วยให้นักพัฒนาสามารถบันทึกหนึ่ง 360 องศาขึ้นไป
พาโนรามาของสถานที่ที่กำหนดจากนั้นทำการดีบักและทดสอบ AR
แอปพลิเคชันในความสะดวกสบายของสำนักงานหรือที่บ้านโดยไม่ต้องไป
ทำการเปลี่ยนแปลงอย่างกว้างขวางในการเขียนโปรแกรม
รหัส.
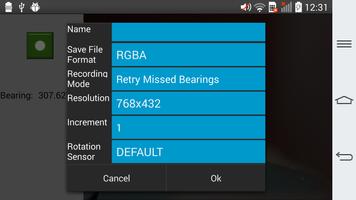
แอพนี้เป็นเครื่องบันทึก Aaremu มันทำงานโดยการแสดงเอาต์พุตกล้องในโหมดเต็มหน้าจอด้วยลิ้นชักอินเตอร์เฟสที่ขอบด้านซ้ายของจอแสดงผลซึ่งสามารถลากออกได้ ในการเริ่มบันทึกลากลิ้นชักออกแล้วคลิกปุ่มบันทึก ในช่วงเริ่มต้นของการบันทึกผู้ใช้จะถูกขอให้ระบุชื่อสำหรับไฟล์บันทึกวิธีการบันทึกรูปแบบไฟล์ความละเอียดการบันทึกการเพิ่มขึ้นและการใช้เซ็นเซอร์การวางแนวใดที่จะใช้
รูปแบบไฟล์สามารถเป็นหนึ่งใน RGBA, RGB, RGB565, NV21 และ YV12
ในขณะที่ส่งผลให้ไฟล์ขนาดใหญ่ RGBA เป็นที่ต้องการเป็นหน่วยพื้นผิว GPU
ทำงานได้ดีที่สุดกับพื้นผิวที่จัดเรียง 4 ไบต์และการใช้งาน OpenGL ส่วนใหญ่
แปลงเป็น RGBA ภายใน
ความละเอียดสามารถเลือกได้ในสปินเนอร์ซึ่งให้ความละเอียดทั้งหมด
รองรับโดยอุปกรณ์ การเพิ่มการบันทึกระบุการเพิ่มขึ้นของแบริ่ง
ระหว่างเฟรมที่บันทึกไว้ เซ็นเซอร์การหมุนระบุว่าเซ็นเซอร์ทิศทางใด
วิธีฟิวชั่นที่จะใช้สำหรับการคำนวณการวางแนวและแบริ่งของอุปกรณ์
วิธีการบันทึกในขณะนี้มีการลองใหม่และเดินทางต่อไปจนกว่าจะเสร็จสมบูรณ์ วิธีการลองใหม่ทำงานดังนี้:
เมื่อบันทึกลิ้นชักอินเทอร์เฟซจะแสดงแบริ่งปัจจุบันและแบริ่งเป้าหมาย ในช่วงเริ่มต้นของการบันทึกเป้าหมายถูกตั้งค่าเป็น 355 เพื่อเริ่มต้นที่ 0 ใกล้เข้ามาในทิศทางตามเข็มนาฬิกา พื้นผิวเอาท์พุทของกล้องจะแสดงลูกศรซ้อนทับพร้อมทิศทางของการเคลื่อนไหวซึ่งเป็นสีแดงหากการแก้ไขและสีเขียวหากบันทึก เมื่อผู้ใช้ย้ายไปที่ 355 เป้าหมายจะถูกตั้งค่าเป็น 0 ลูกศรจะกลายเป็นสีเขียวและเริ่มการบันทึก ในระหว่างการบันทึกหากพลาดเฟรมสีลูกศรและทิศทางเปลี่ยนเป็นสีแดงจนกว่าผู้ใช้จะแก้ไข
วิธีการบันทึก Traverse เริ่มบันทึกจากตำแหน่งปัจจุบัน ลูกศรซ้อนทับแสดงทิศทางของการเคลื่อนไหวในขณะที่บันทึก ตลับลูกปืนที่ไม่ได้รับจะไม่ทำให้ผู้ใช้ได้รับแจ้งให้เลื่อนกลับมาแทนแบริ่งที่ไม่ได้รับจะถูกหยิบขึ้นมาในการสำรวจครั้งต่อไปเช่นการสำรวจข้าม 360 องศามากกว่าหนึ่ง 360 องศาในการสำรวจครั้งต่อไปลูกศรที่ซ้อนทับจะเป็นสีน้ำเงิน
สำหรับทั้งสองวิธีที่ทำให้อุปกรณ์อยู่ในมุมแนวตั้งคงที่และการหมุนช้าและราบรื่นเป็นสิ่งสำคัญสำหรับการบันทึกที่แม่นยำ สำหรับวิธีการสำรวจยังพยายามที่จะทำให้การเคลื่อนไหวอย่างต่อเนื่องในทิศทางตามเข็มนาฬิกาโดยไม่มีการพลิกกลับ

August 11, 2025
August 11, 2025
August 10, 2025
August 10, 2025
August 10, 2025
August 10, 2025
August 9, 2025
August 9, 2025
August 8, 2025
August 8, 2025
 ดาวน์โหลด APK(67.01MB)
ดาวน์โหลด APK(67.01MB)